TIPOS DE FUNCIONES
Una función escalonada es aquella función definida a trozos que en cualquier intervalo finito [a, b] en que esté definida tiene un número finito de discontinuidades c1 < c2 < ... < cn, y en cada intervalo abierto (ck, ck+1) es constante, teniendo discontinuidades de salto en los puntos ck.
En ingeniería es común encontrar funciones que corresponden a estados de sí o no, o bien activo o inactivo. Por ejemplo, una fuerza externa que actúa sobre un sistema mecánico o una tensión eléctrica aplicada a un circuito, puede tener que suspenderse después de cierto tiempo. Para tratar de forma efectiva con estas funciones discontinuas conviene introducir una función especial llamada función escalón unitario.
CARACTERÍSTICAS
Una función escalonada es aquella cuya gráfica tiene la forma de una escalera que pueden ascender o descender al ser dibujadas. El ejemplo más común de función escalonada es la función parte entera, Función escalón de Heaviside o función escalón unitario, y la función signo.
La composición de cualquier función escalonada s(x) y una función cualquiera f(x) da por resultado una función escalonada g(x) = f(s(x)), siempre que f(x) esté definida para cualquier valor de x en el rango de s(x).
Evidentemente, la derivada de una función escalonada es 0 en cualquier punto en que se halle definida. No puede definirse en los puntos en que hay discontinuidades.
Función Rampa
La función rampa es una función elemental real de un sólo argumento, continua y diferenciable en todo su dominio excepto en un punto (inicio de la rama) fácilmente computable a partir de la función mínimo o la función valor absoluto.
Las principales aplicaciones prácticas de esta función se dan en ingeniería (procesamiento digital, de señales, plasticidad, etc.). El término "función rampa" se debe a la forma de su representación gráfica.
La función rampa (denotada de diferentes maneras en la literatura científica:

Y que se define de esta forma:

Puede definirse de diferentes maneras equivalentes:

 (en términos de la función valor absoluto)
(en términos de la función valor absoluto)  (en términos de la función máximo)
(en términos de la función máximo)  (en términos de la función unitaria de Heaviside)
(en términos de la función unitaria de Heaviside)
Algunas formas menos elementales de definirla son:

(primitiva de la función unitaria de Heaviside)
 (producto de convolución)
(producto de convolución)
Función Senoidal
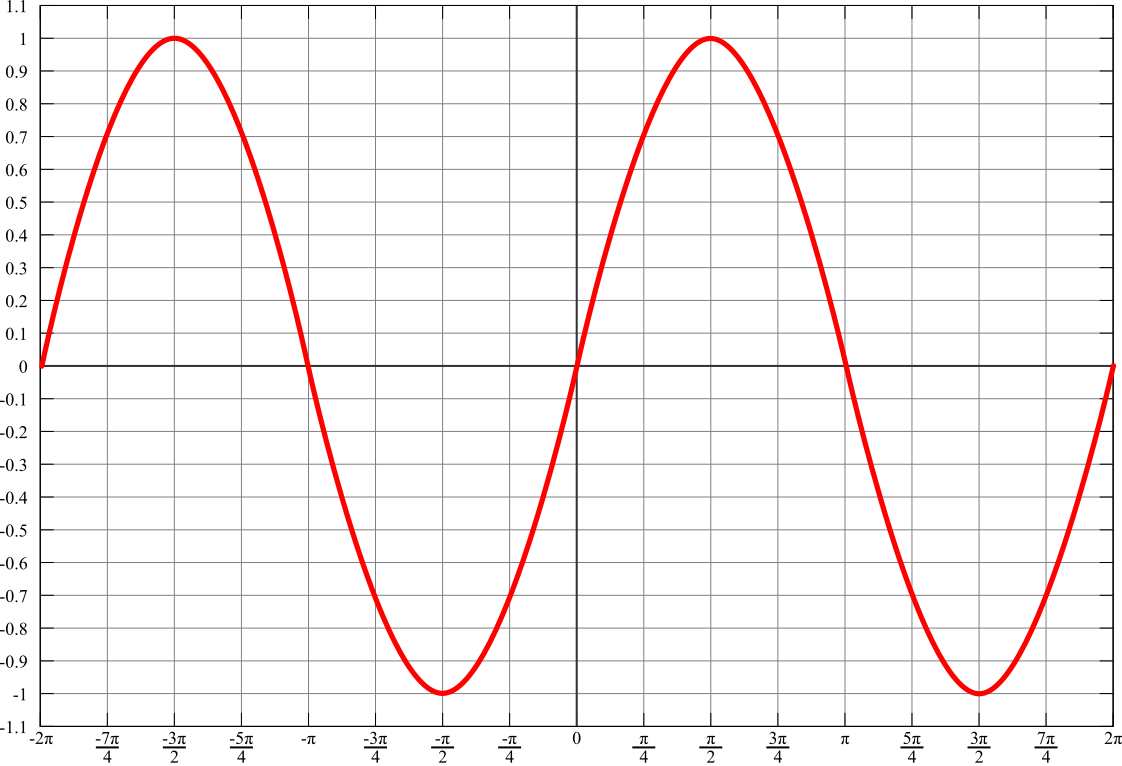
En matemáticas se denomina sinusoide o senoide a la curva que representa gráficamente la función seno y también a dicha función en sí. Es una curva que describe una oscilación repetitiva y suave.
Su forma más básica en función del tiempo (t) es:

La senoide es importante en física debido al hecho descrito por el teorema de Fourier que dice que toda onda, cualquiera que se sea su forma, puede expresarse de manera única como superposición (suma) de ondas sinosuidales de longitudes de onda y amplitudes definidas.Por este motivo se usa esta función para representar tanto a las ondas sonoras como las de la corriente alterna.
CARACTERÍSTICAS

Período (T) en una sinusoide
Es el menor conjunto de valores de  que corresponden a un ciclo completo de valores de la función; en este sentido toda función de una variable que repite sus valores en un ciclo completo es una función periódica, seno o no sinusoidal.
que corresponden a un ciclo completo de valores de la función; en este sentido toda función de una variable que repite sus valores en un ciclo completo es una función periódica, seno o no sinusoidal.
que corresponden a un ciclo completo de valores de la función; en este sentido toda función de una variable que repite sus valores en un ciclo completo es una función periódica, seno o no sinusoidal.
En las gráficas de las funciones seno-coseno el período es  .
.
.
Amplitud (A) en una sinusoide
Es el máximo alejamiento en el valor absoluto de la curva medida desde el eje x.
Desde un punto de vista más técnico, la amplitud de la sinusoide es la norma del supremo de la sinusoide:

Fase inicial (φ) en una sinusoide
La fase da una idea del desplazamiento horizontal de la sinusoide. Si dos sinusoides tienen la misma frecuencia e igual fase, se dice que están en fase.
Si dos sinusoides tienen la misma frecuencia y distinta fase, se dice que están en desfase, y una de las sinusoides está adelantada o atrasada con respecto de la otra.
Carece de sentido comparar la fase de dos sinusoides con distinta frecuencia, puesto que éstas entran en fase y en desfase periódicamente.
Función Impulso.
Algunos sistemas mecánicos suelen estar sometidos a una fuerza externa (o a una tensión eléctrica en el caso de los circuitos eléctricos) de gran magnitud, que solamente actúa durante un tiempo muy corto. Por ejemplo, una descarga eléctrica podría caer sobre el ala vibrante de un avión; a un cuerpo sujeto a un resorte podría dársela un fuerte golpe con un martillo, una pelota (de béisbol, de golf o de tenis) inicialmente en reposo, podría ser enviada velozmente por los aires al ser golpeada con violencia con un objeto como una bat de béisbol, un bastón de golf o una raqueta de tenis. La función impulso unitario puede servir como un modelo para tal fuerza.

¿PARA QUE SIRVEN LOS TEOREMAS DE LA TRANSFORMADA DE LAPLACE?
La Transformada de Laplace es una técnica Matemática que forma parte de ciertas transformadas integrales como la transformada de Fourier, la transformada de Hilbert, y la transformada de Mellin entre otras. Estas transformadas están definidas por medio de una integral impropia y cambian una función en una variable de entrada en otra función en otra variable. La transformada de Laplace puede ser usada para resolver Ecuaciones Diferenciales Lineales y Ecuaciones Integrales. Aunque se pueden resolver algún tipo de ED con coeficientes variables, en general se aplica a problemas con coeficientes constantes. Un requisito adicional es el conocimiento de las condiciones iniciales a la misma ED. Su mayor ventaja sale a relucir cuando la función en la variable independiente que aparece en la ED es una función seccionada.
Cuando se resuelven ED usando la técnica de la transformada, se cambia una ecuación diferencial en un problema algebraico. La metodología consiste en aplicar la transformada a la ED y posteriormente usar las propiedades de la transformada. El problema de ahora consiste en encontrar una función en la variable independiente tenga una cierta expresión como transformada.
Definición de la Transformada Inversa
La transforma inversa de una función de s de la forma F(s-a) se puede resolver a través del uso del primer teorema de traslación de la transformada de laplace.La inversa será igual a e^at por la inversa de F(s) que se forma tras cambiar s-a por s.
En muchos casos esta técnica es un mejor alternativa frente al uso de fracciones parciales ya que no todas las funciones racionales nos permiten factorizar el denominador cuando este es una función cuadrática. Es por ello que se hace necesario hacer uso de la completación del trinomio cuadrado perfecto.








